成立宗旨
計畫成立新創公司迪羅科技股份有限公司,採用「不用寫程式」技術開發機器手臂,將機器手臂簡單地導入產業之自動化生產。迪羅科技公司以創新的教導方式與人工智慧學習分析來教導機器手臂完成製造加工任務,可使工廠作業員輕鬆地使用機器手臂,突破目前需要專業人員來操作機器手臂的問題,此創新的方式降低目前機器手臂使用門檻,幫助許多中小型製造業印證本計畫之具體效益。

成立規劃
一、 成立動機(投資目的)
因應中小型製造業人力短缺,因此急需導入自動化,但目前機器手臂與系統整合廠商無法提供有效簡單的機器手臂解決方案,導致許多中小型製造業無法導入自動化。同時隨著工廠有經驗的師傅即將退休與年輕人力不易招聘下,機器人自動化為這些製造業者當務之急。因此迪羅科技公司在這樣強烈需求動機下,提供中小型製造業者「不用寫程式」來使用機器手臂的軟體,透過本軟體整合力量與影像感測週邊,將目前市售的工業機器手臂升級成工業4.0所強調的具有協同感知功能的智慧機器人。 二、 營業項目(所營事業)
依經濟部所登記,迪羅科技公司主要營業項目如下所列:
CB01010機械設備造業
CC01010發電﹑輸電﹑配電機械製造業
CC01080電子零組件製造業
CC01110電腦及其週邊設備製造業
CC01990其他電機及電子機械器材製造業
CE01010一般儀器製造業
E601010電器承裝業
E603010電纜安裝工程業
E603050自動控制設備工程業
E603090照明設備安裝工程業
E604010機械安裝業
E605010電腦設備安裝業
E606010用電設備檢驗維護業
EZ05010儀器、儀表安裝工程業
F213030電腦及事務性機器設備零售業
F213040精密儀器零售業
F213060電信器材零售業
F218010資訊軟體零售業
F219010電子材料零售業
F401010國際貿易業
I301010資訊軟體服務業
I301020資料處理服務業
I301030電子資訊供應服務業
IG03010能源技術服務業
ZZ99999除許可業務外,得經營法令非禁止或限制之業務
因應中小型製造業人力短缺,因此急需導入自動化,但目前機器手臂與系統整合廠商無法提供有效簡單的機器手臂解決方案,導致許多中小型製造業無法導入自動化。同時隨著工廠有經驗的師傅即將退休與年輕人力不易招聘下,機器人自動化為這些製造業者當務之急。因此迪羅科技公司在這樣強烈需求動機下,提供中小型製造業者「不用寫程式」來使用機器手臂的軟體,透過本軟體整合力量與影像感測週邊,將目前市售的工業機器手臂升級成工業4.0所強調的具有協同感知功能的智慧機器人。 二、 營業項目(所營事業)
依經濟部所登記,迪羅科技公司主要營業項目如下所列:
CB01010機械設備造業
CC01010發電﹑輸電﹑配電機械製造業
CC01080電子零組件製造業
CC01110電腦及其週邊設備製造業
CC01990其他電機及電子機械器材製造業
CE01010一般儀器製造業
E601010電器承裝業
E603010電纜安裝工程業
E603050自動控制設備工程業
E603090照明設備安裝工程業
E604010機械安裝業
E605010電腦設備安裝業
E606010用電設備檢驗維護業
EZ05010儀器、儀表安裝工程業
F213030電腦及事務性機器設備零售業
F213040精密儀器零售業
F213060電信器材零售業
F218010資訊軟體零售業
F219010電子材料零售業
F401010國際貿易業
I301010資訊軟體服務業
I301020資料處理服務業
I301030電子資訊供應服務業
IG03010能源技術服務業
ZZ99999除許可業務外,得經營法令非禁止或限制之業務
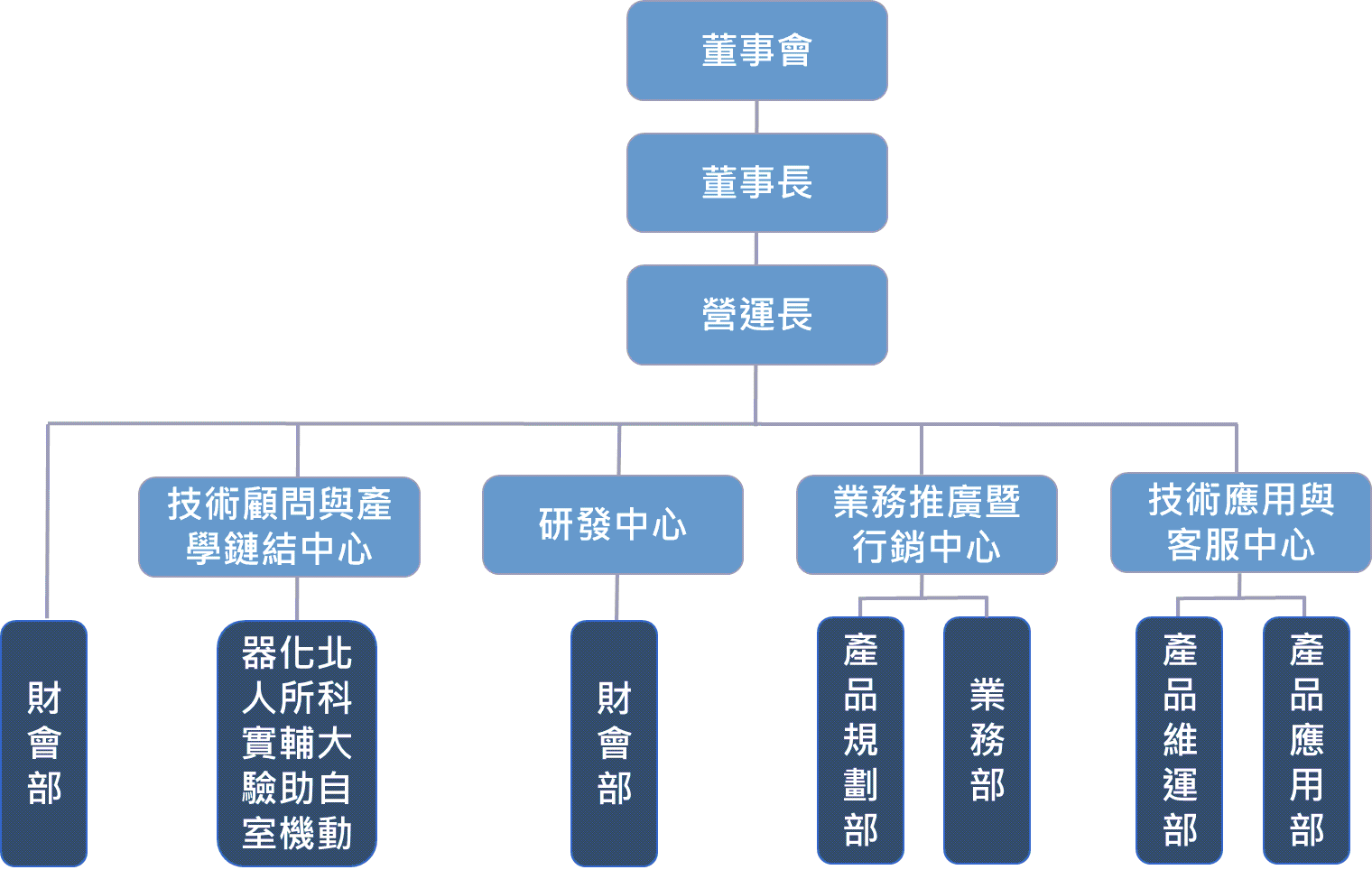
組織架構
產品服務
一. 簡介
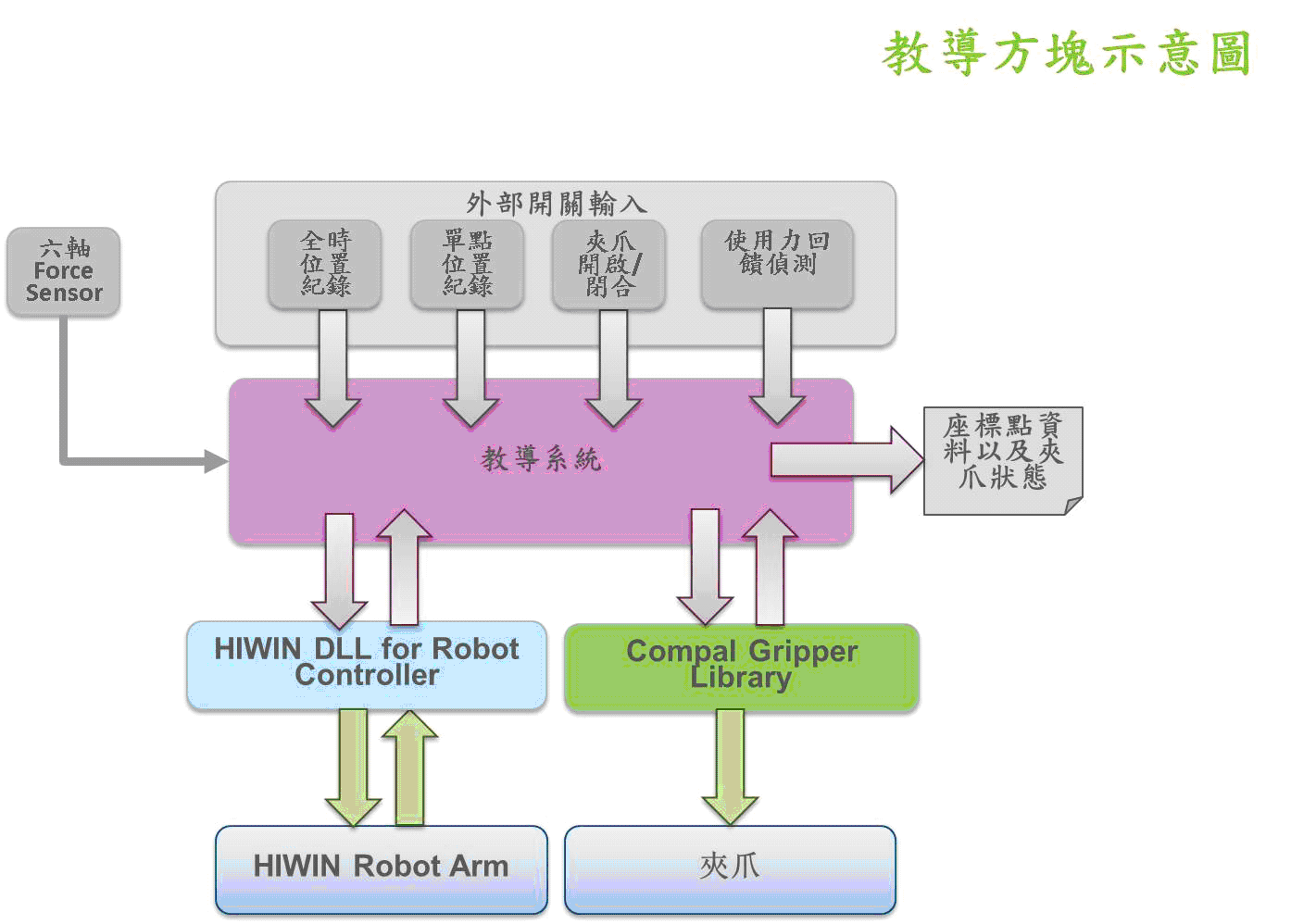
迪羅科技提供結合影像及順應控制的智慧教導系統,允許使用者徒手教導(teaching) 機器手臂完成期望的運動,點位教導過程運用曲線擬合(curve fitting)智慧優化軌跡,並佐以平行運算(GPU)深度學習(deep learning)影像處理功能輔助軌跡精準度,允許使用者可撥放(re-play)其所記錄的軌跡,讓機器手臂重覆其運動,以達到人機協同合作快速定位的功能。 二. 功能架構圖
 三. 硬體功能規格說明
三. 硬體功能規格說明
1. 機器手臂系統:
HIWIN 簡易型控制器 編號: RCA-605C /製造商: HIWIN上銀
Denso Robot 編號: VS-6556 /製造商: Denso
Epson RC+ 編號: C3-A600 /製造商: Epson
Staübli TX Series編號: TX40 /製造商: Staübli
Yaskawa FESIF 編號: MH5F /製造商: Yaskawa
ABB Robotic /製造商: ABB
2. 六軸力感應器:
六軸力感應器(6 Axis Force Sensor): 參考型號:: WEF-6A200-4-RC5 / 製造商: WACOH 3. 高解析度影像系統:
PC連接影像設備: 參考型號: DMK 33GR0134 / 製造商: Imagesource
嵌入式影像設備: 參考型號: Jetson TX2 embedded system / 製造商: Nvidia
4. 夾爪 (Gripper)控制系統:
HIWIN Gripper+
Gripper Controller + DC Power Supply 編號: XEG-32-C1303-W1 / 製造商: HIWIN上銀
5. 治具開發設計:
夾爪前端適應工件特性之治具開發設計: / 製造商: 迪羅科技
6. I/O 控制系統:
I/O Controllers (Modbus RTU/TCP compatible devcie) 7. 主機
Laptop
8. 按鍵腳踏板
四. 人工智慧功能說明
1. 順應控制:
點位教導:
根據力回饋功能進行導那控制, 納入雜訊慮波過程 曲線擬合分析:
連續點位學習的結果經過曲線擬合以優化路徑,經過多種統計模型,如BSpline︑Polynomial︑Gaussian Mix Model/Regression等搜尋最佳路徑
2. 影像辨識:
物件分類:
判別不同加工物件或同一物件不同面相 位置判斷:
判別物件大小︑距離及旋轉角度︑移動速度等 鏡頭校正:
鏡頭內部參數及外部參數校正過程 3. 系統整合:
手臂加工進料出料過程PLC控制整合︑以Ethernet 或 Serial通訊控制及邏輯規劃
I/O控制: 夾爪進程控制以數位輸出入點或通訊方式控制
五. 軟體功能規格說明
1 順應控制
經由USB介面讀取六軸力感應器(force sensor)輸出訊號,即時控制機器手臂,達到人機協同順應性控制。
提供使用者設定選項:
選擇記錄方式:全時紀錄、單點紀錄。
編輯記錄功能:可選擇已教導紀錄的檔案作單一步驟編輯功能,來有效校正並正確地抓取物體。
紀錄儲存功能:針對已記錄的檔案作命名儲存。
錄製回放功能:針對已記錄以及讀取之前所記錄的檔案作立即回播。
可指定夾爪開或關所選擇的位置並一併紀錄至記錄檔中。
可指定手臂移動速動百分比並一併紀錄至記錄檔中。
手臂教導控制靈敏度設定。
可單獨鎖定某一軸或一平面設定。
回歸原點功能。
教導點輸出格式設定(6軸座標或關節座標、夾具開/關時所指定的夾爪位置以及手臂移動速度)。
卡曼濾波器(kalmann filter)參數設定。
2 人工智慧功能
點位教導過程運用曲線擬合智慧優化軌跡,影像處理功能應用GPU平行運算進行深度學習以加強軌跡精準度
提供使用者設定選項:
多次連續點位教導記錄之曲線擬合: BSpline, Polynomial, Gaussian Mix Model/ Regression。
物件分類: 判別不同加工物件或同一物件不同面相
位置判斷: 判別物件大小︑距離及旋轉角度︑移動速度等
鏡頭校正: 鏡頭內部參數及外部參數校正過程
3 系統整合功能 提供外部硬體開關按鈕(Button),讓使用者紀錄教導點。
提供外部硬體開關按鈕,讓使用者依照使用者介面所指定的開關位置來即時傳送開關指令控制I/O夾爪開關,與速度。
提供外部硬體開關按鈕,作為PLC控制系統整合進料出料製程。
提供PLC Ethernet/UART通訊功能,作為PLC控制系統整合進料出料製程。
迪羅科技提供結合影像及順應控制的智慧教導系統,允許使用者徒手教導(teaching) 機器手臂完成期望的運動,點位教導過程運用曲線擬合(curve fitting)智慧優化軌跡,並佐以平行運算(GPU)深度學習(deep learning)影像處理功能輔助軌跡精準度,允許使用者可撥放(re-play)其所記錄的軌跡,讓機器手臂重覆其運動,以達到人機協同合作快速定位的功能。 二. 功能架構圖
三. 硬體功能規格說明1. 機器手臂系統:
HIWIN 簡易型控制器 編號: RCA-605C /製造商: HIWIN上銀
Denso Robot 編號: VS-6556 /製造商: Denso
Epson RC+ 編號: C3-A600 /製造商: Epson
Staübli TX Series編號: TX40 /製造商: Staübli
Yaskawa FESIF 編號: MH5F /製造商: Yaskawa
ABB Robotic /製造商: ABB
2. 六軸力感應器:
六軸力感應器(6 Axis Force Sensor): 參考型號:: WEF-6A200-4-RC5 / 製造商: WACOH 3. 高解析度影像系統:
PC連接影像設備: 參考型號: DMK 33GR0134 / 製造商: Imagesource
嵌入式影像設備: 參考型號: Jetson TX2 embedded system / 製造商: Nvidia
4. 夾爪 (Gripper)控制系統:
HIWIN Gripper+
Gripper Controller + DC Power Supply 編號: XEG-32-C1303-W1 / 製造商: HIWIN上銀
5. 治具開發設計:
夾爪前端適應工件特性之治具開發設計: / 製造商: 迪羅科技
6. I/O 控制系統:
I/O Controllers (Modbus RTU/TCP compatible devcie) 7. 主機
Laptop
8. 按鍵腳踏板
四. 人工智慧功能說明
1. 順應控制:
點位教導:
根據力回饋功能進行導那控制, 納入雜訊慮波過程 曲線擬合分析:
連續點位學習的結果經過曲線擬合以優化路徑,經過多種統計模型,如BSpline︑Polynomial︑Gaussian Mix Model/Regression等搜尋最佳路徑
2. 影像辨識:
物件分類:
判別不同加工物件或同一物件不同面相 位置判斷:
判別物件大小︑距離及旋轉角度︑移動速度等 鏡頭校正:
鏡頭內部參數及外部參數校正過程 3. 系統整合:
手臂加工進料出料過程PLC控制整合︑以Ethernet 或 Serial通訊控制及邏輯規劃
I/O控制: 夾爪進程控制以數位輸出入點或通訊方式控制
五. 軟體功能規格說明
1 順應控制
經由USB介面讀取六軸力感應器(force sensor)輸出訊號,即時控制機器手臂,達到人機協同順應性控制。
提供使用者設定選項:
選擇記錄方式:全時紀錄、單點紀錄。
編輯記錄功能:可選擇已教導紀錄的檔案作單一步驟編輯功能,來有效校正並正確地抓取物體。
紀錄儲存功能:針對已記錄的檔案作命名儲存。
錄製回放功能:針對已記錄以及讀取之前所記錄的檔案作立即回播。
可指定夾爪開或關所選擇的位置並一併紀錄至記錄檔中。
可指定手臂移動速動百分比並一併紀錄至記錄檔中。
手臂教導控制靈敏度設定。
可單獨鎖定某一軸或一平面設定。
回歸原點功能。
教導點輸出格式設定(6軸座標或關節座標、夾具開/關時所指定的夾爪位置以及手臂移動速度)。
卡曼濾波器(kalmann filter)參數設定。
2 人工智慧功能
點位教導過程運用曲線擬合智慧優化軌跡,影像處理功能應用GPU平行運算進行深度學習以加強軌跡精準度
提供使用者設定選項:
多次連續點位教導記錄之曲線擬合: BSpline, Polynomial, Gaussian Mix Model/ Regression。
物件分類: 判別不同加工物件或同一物件不同面相
位置判斷: 判別物件大小︑距離及旋轉角度︑移動速度等
鏡頭校正: 鏡頭內部參數及外部參數校正過程
3 系統整合功能 提供外部硬體開關按鈕(Button),讓使用者紀錄教導點。
提供外部硬體開關按鈕,讓使用者依照使用者介面所指定的開關位置來即時傳送開關指令控制I/O夾爪開關,與速度。
提供外部硬體開關按鈕,作為PLC控制系統整合進料出料製程。
提供PLC Ethernet/UART通訊功能,作為PLC控制系統整合進料出料製程。